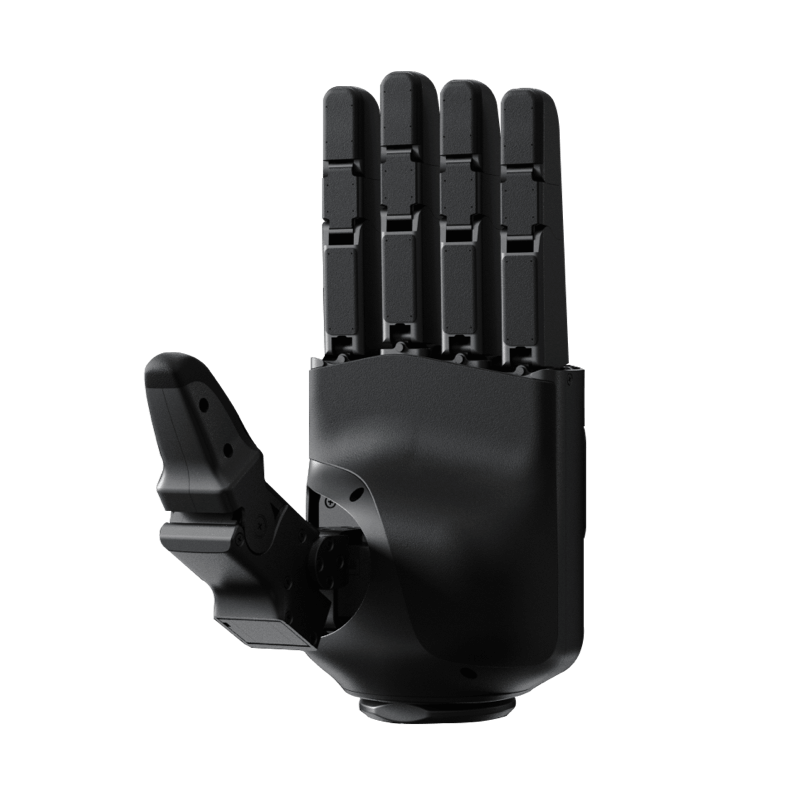
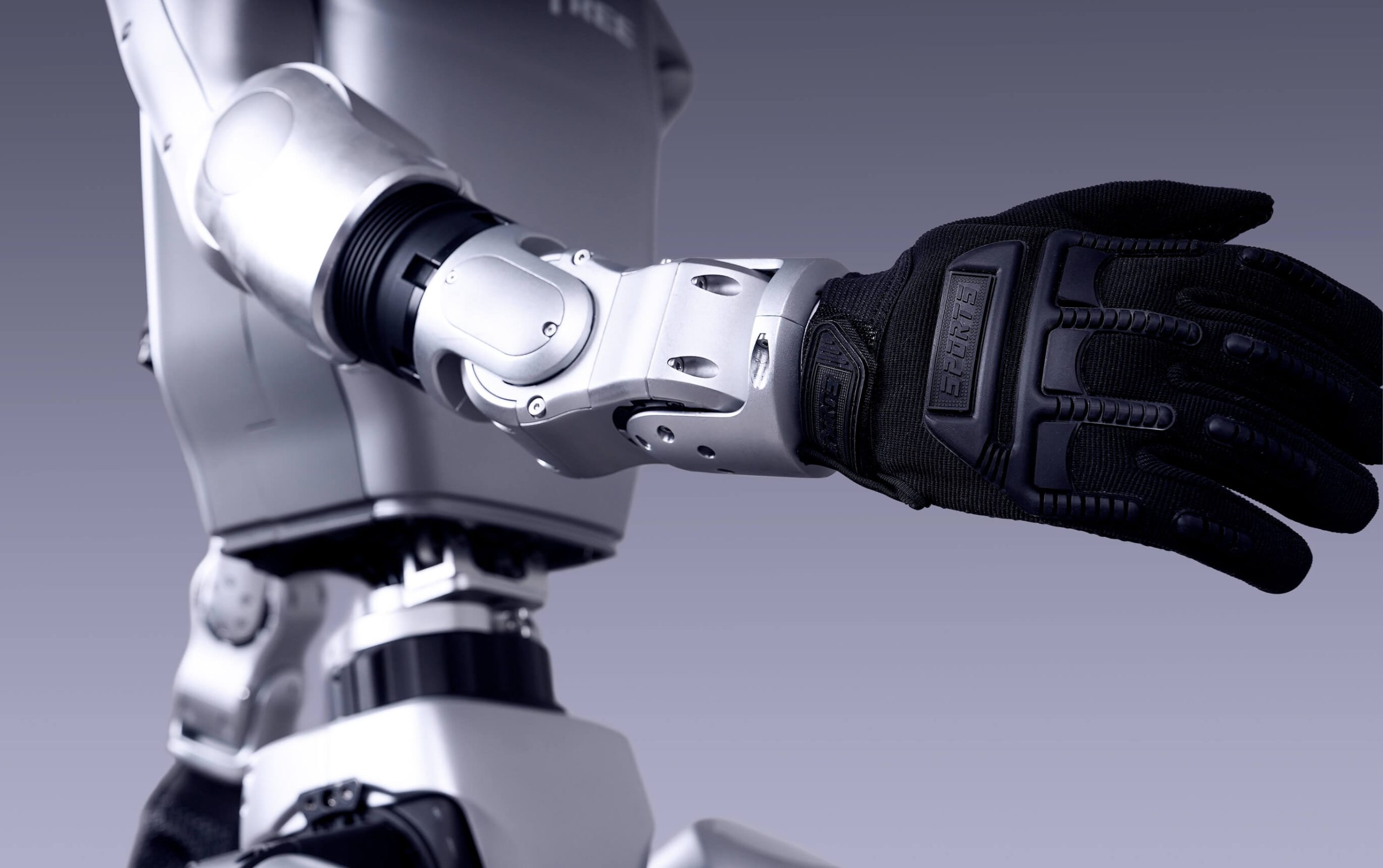
7 (optional force-controlled 3-finger dexterous hand Dex3-1)+ 2 (optional 2 wrist degrees of freedom)
* Parameters of 3-finger Dex3-1: 3 active degrees of freedom for thumb; 2 active degrees of freedom for index finger; 2 active degrees of freedom for middle finger
**Dex3-1 can be equipped with a multi-tactile array
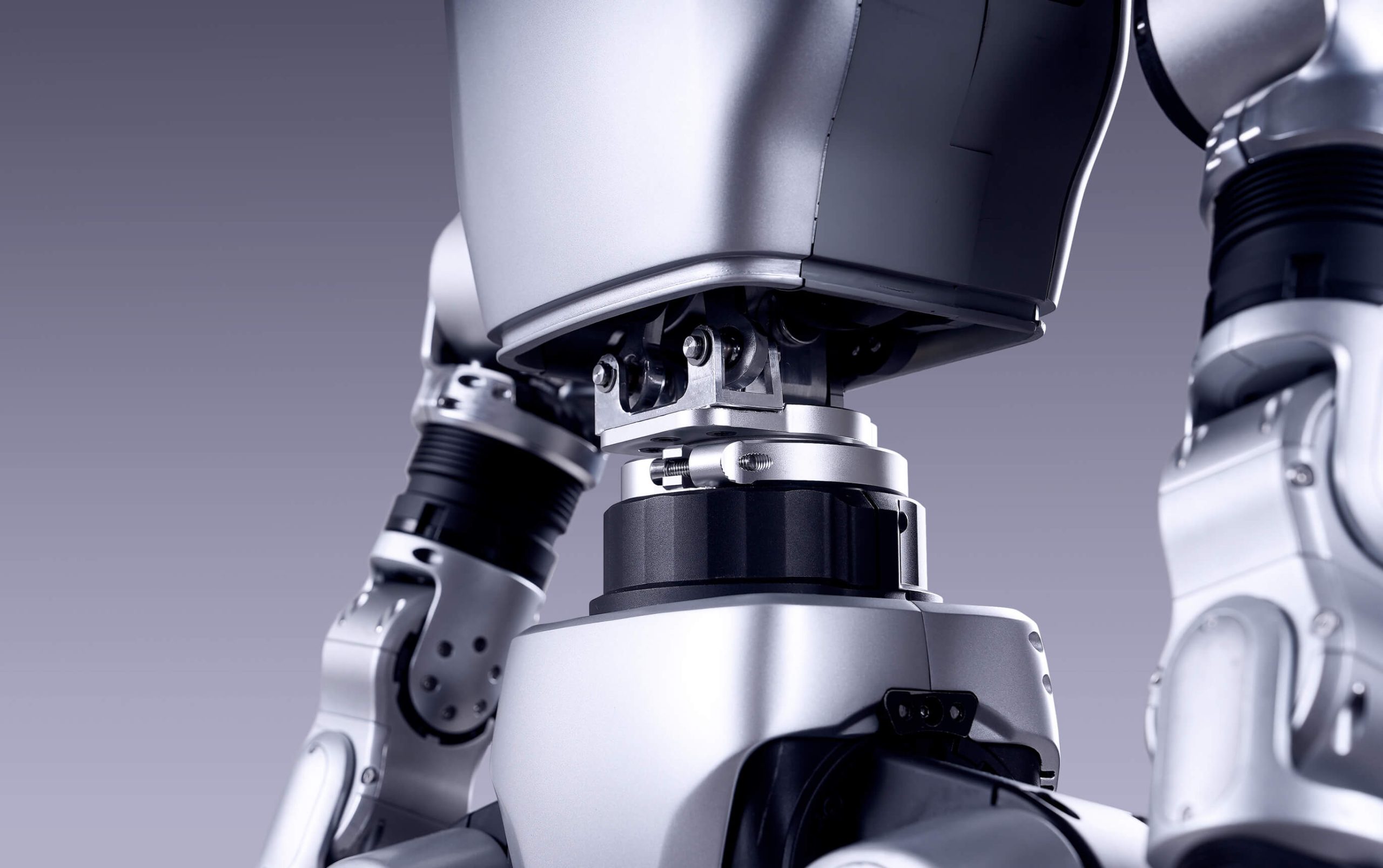
Joint output bearing
Industrial grade cross roller bearing (high precision, high load capacity)
Industrial grade cross roller bearing (high precision, high load capacity)
Joint motor
Low inertia high-speed inner rotor permanent magnet synchronous motor (better response speed and heat dissipation)
Low inertia high-speed inner rotor permanent magnet synchronous motor (better response speed and heat dissipation)
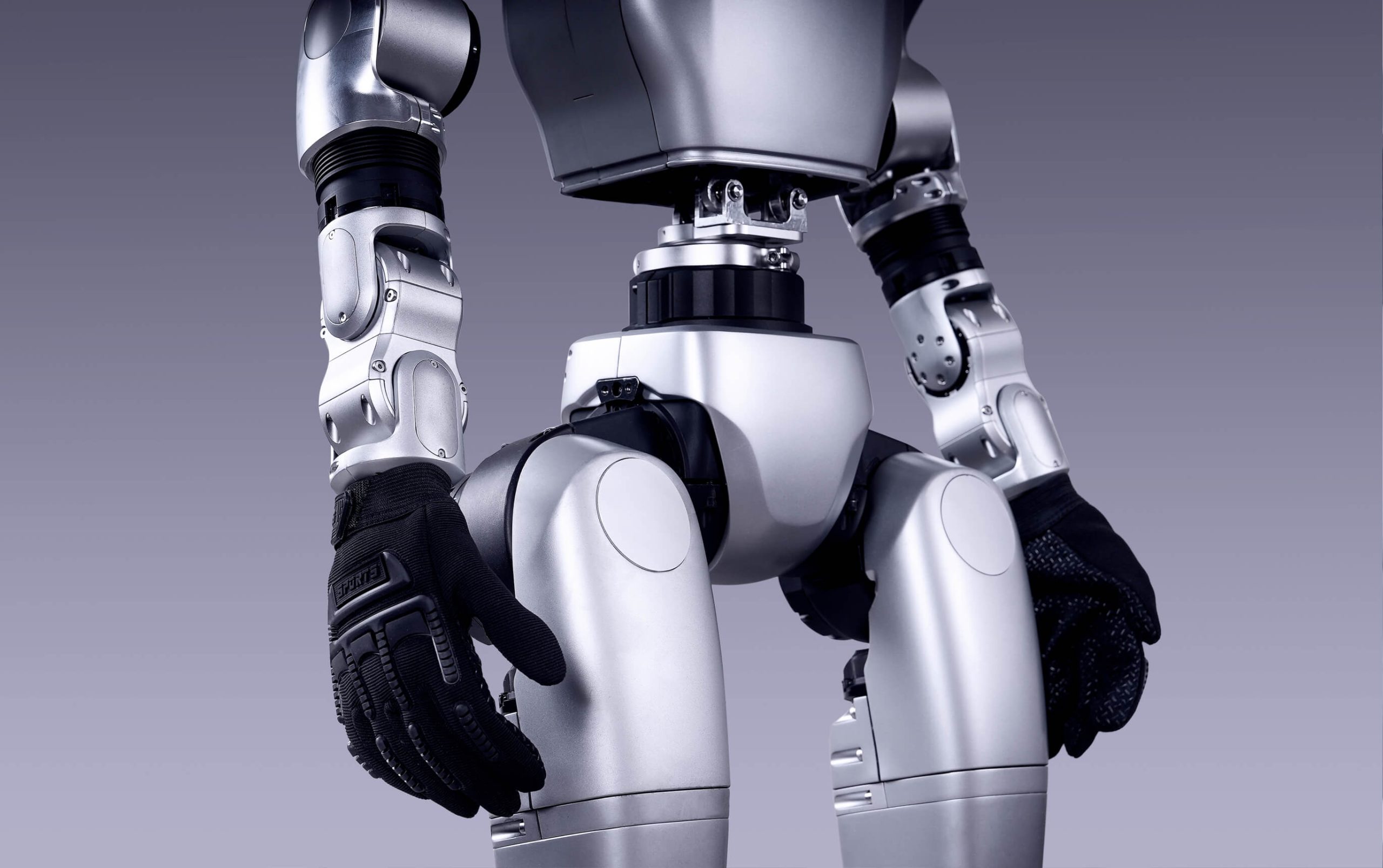
Maximum torque of knee joint [1]
90N.m
120N.m
Maximum arm load [2]
About 2Kg
About 3Kg
Calf + thigh length
0.6M
0.6M
Arm span
About 0.45M
About 0.45M
Ultra-large joint movement space
Waist joint: Z±155°
Knee joint: 0~165°
Hip Joints: P±154°, R-30~+170°, Y±158°
Waist joints: Z±155°, X±45°, Y±30°
Knee joints: 0~165°
Hip joints: P±154°, R-30~+170°, Y±158°
Wrist joints: P±92.5°, Y±92.5°
Electrical characteristics
All joints are hollow and have internal wiring